
LaunchPad Flight Controller
Esta es una aplicación de controlador de vuelo utilizado para un quadcopter en X-configuración.
Está escrito para el Tiva Serie C TM4C123G LaunchPad funcionando a 80 MHz.
Más información se puede encontrar en las siguientes publicaciones en el blog: http://blog.tkjelectronics.dk/2015/01/launchpad-flight-controller y http://blog.tkjelectronics.dk/2015/08/bachelors-thesis-launchpad -vuelo-controlador.
Vuelo código fuente del controlador: https://github.com/Lauszus/LaunchPadFlightController
Android de código fuente de la aplicación: https://github.com/Lauszus/LaunchPadFlightControllerAndroid
# Caracteristicas
* Modo de ritmo, modo de nivel de uno mismo, en dirección espera y retención de altitud
- __AUX1: __ Utilice el interruptor 3-POS para el nivel de uno mismo y espera la partida. En primera posición los dos están desactivados, en segunda posición de nivel de auto está encendido y en la tercera posición de ambos se encuentran en
- __AUX2: __ Utilice un interruptor de 3-POS para el mantenimiento de altitud. Tenga en cuenta que el modo de nivel uno mismo debe estar activado para el mantenimiento de altitud para trabajar! A primera posición de mantenimiento de altitud está apagado, en segunda posición de retención altitud utilizará la distancia se mide utilizando el sonar y en la tercera posición de mantenimiento de altitud va a utilizar la altitud estimada usando el barómetro y el acelerómetro
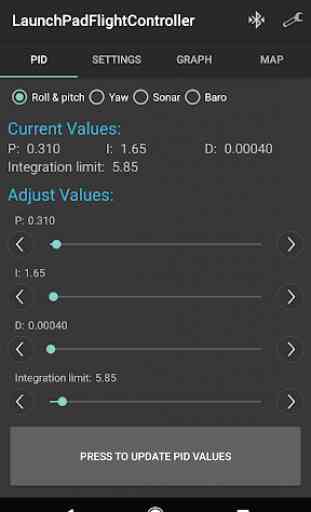
* Almacene PID valores, valores de calibración en la EEPROM, etc.
* Gyro, rutina de calibración acelerómetro y magnetómetro
- Gyro se calibra en el arranque
- Acelerómetro y magnetómetro rutina de calibración se pueden activar en el código o mediante el uso de la aplicación para Android
- El magnetómetro se enciende el LED azul durante la calibración
controlador de vuelo + Girar lentamente a lo largo de los tres ejes
* Armar / desarmar el uso del timón
* LED de estado
* Compatible con receptores CPPM
* Gyro & acelerómetro (MPU-6500 o MPU-9250)
* Magnetómetro (HMC5883L o AK8963 (dentro MPU-9250))
* Barómetro (BMP180)
* El ultrasonido también conocido como sensor de la sonda (HC-SR04)
* [Aplicación Android] (https://github.com/Lauszus/LaunchPadFlightControllerAndroid)
* OneShot125 el apoyo del CES
* Retroalimentación del zumbado
Está escrito para el Tiva Serie C TM4C123G LaunchPad funcionando a 80 MHz.
Más información se puede encontrar en las siguientes publicaciones en el blog: http://blog.tkjelectronics.dk/2015/01/launchpad-flight-controller y http://blog.tkjelectronics.dk/2015/08/bachelors-thesis-launchpad -vuelo-controlador.
Vuelo código fuente del controlador: https://github.com/Lauszus/LaunchPadFlightController
Android de código fuente de la aplicación: https://github.com/Lauszus/LaunchPadFlightControllerAndroid
# Caracteristicas
* Modo de ritmo, modo de nivel de uno mismo, en dirección espera y retención de altitud
- __AUX1: __ Utilice el interruptor 3-POS para el nivel de uno mismo y espera la partida. En primera posición los dos están desactivados, en segunda posición de nivel de auto está encendido y en la tercera posición de ambos se encuentran en
- __AUX2: __ Utilice un interruptor de 3-POS para el mantenimiento de altitud. Tenga en cuenta que el modo de nivel uno mismo debe estar activado para el mantenimiento de altitud para trabajar! A primera posición de mantenimiento de altitud está apagado, en segunda posición de retención altitud utilizará la distancia se mide utilizando el sonar y en la tercera posición de mantenimiento de altitud va a utilizar la altitud estimada usando el barómetro y el acelerómetro
* Almacene PID valores, valores de calibración en la EEPROM, etc.
* Gyro, rutina de calibración acelerómetro y magnetómetro
- Gyro se calibra en el arranque
- Acelerómetro y magnetómetro rutina de calibración se pueden activar en el código o mediante el uso de la aplicación para Android
- El magnetómetro se enciende el LED azul durante la calibración
controlador de vuelo + Girar lentamente a lo largo de los tres ejes
* Armar / desarmar el uso del timón
* LED de estado
* Compatible con receptores CPPM
* Gyro & acelerómetro (MPU-6500 o MPU-9250)
* Magnetómetro (HMC5883L o AK8963 (dentro MPU-9250))
* Barómetro (BMP180)
* El ultrasonido también conocido como sensor de la sonda (HC-SR04)
* [Aplicación Android] (https://github.com/Lauszus/LaunchPadFlightControllerAndroid)
* OneShot125 el apoyo del CES
* Retroalimentación del zumbado
Categoría : Educación
Búsquedas relacionadas
Esta padre